2016 Aug.11 - Oct.23 "Aichi Triennale" →機構の美術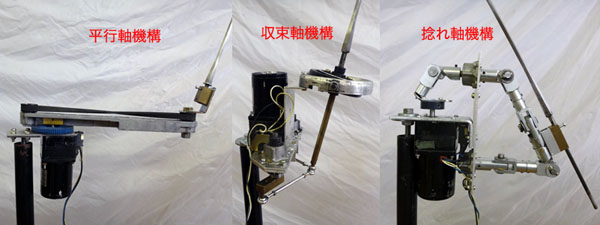 |
||
| 平行軸機構 mov 動作範囲 1200丸,1800h 1) 本体 400x200x60 4.5kg 2) 剣ブレード 930L 3) スタンド 350丸700h, 3kg モータ 2IK180 6w |
収束軸機構 動作範囲 1200丸,1800h 1) 本体 200x2000x200 5kg 2) 剣ブレード 1060L 3) スタンド 350丸700h, 3kg モータ 2IK75 6w |
捻れ軸機構 動作範囲 1200丸,1800h 1) 本体 270x220x60 5kg 2) 剣ブレード 1060L 3) スタンド 350丸700h, 3kg モータ 2IK100 6w |
| Shiro Takahashi → Raymond Roussel → Chapter 3 of "Impressions of Africa" The fencing engine - Chapter 3 of "Impressions d'Africa" Raymond Roussel - 技術者メゾニヤルが発明した「フェンシング機械」は、独楽などの弾み車に外力が加わると意外な運動をする角運動量保存則を応用した剣術ロボットで、歯車式のプログラムを切替えると、フェイントをかけながら剣先はずし・まわし突き・切り上げを仕掛け、チヤンピオンの人間剣士を打ち負かす。
|
|
  |
 |
|
デガジユ disengages 剣先はずし Fencing Robot |
|
|
|




{kind=link}